 Image credit: Huan Jiang
Image credit: Huan JiangAbstract
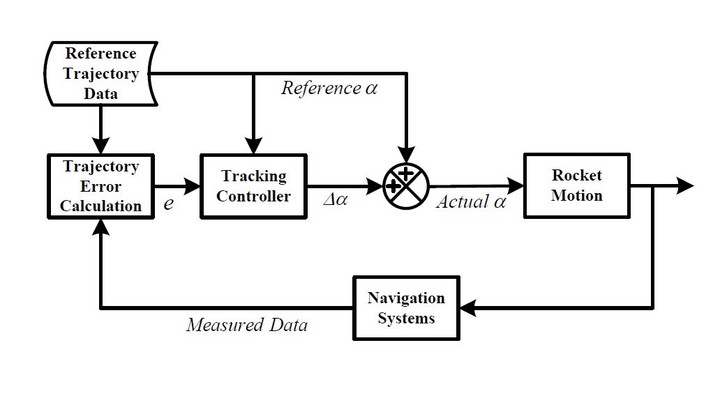
To reduce the expenditure, a low-performance guidance and control system is usually employed in the design of guided artillery rockets, which however will induce great difficulties in trajectory tracking because the rocket’s parameters vary fast over a large operation range. The traditional time invariant control approaches for trajectory tracking cannot guarantee the adaptability of controller. On the other hand, since time is routinely considered as the independent variable, the dynamic error system varies sharply, resulting in a weak anti-jamming capability. To address these issues, a new trajectory tracking approach for guided rockets is developed by using the robust gain-scheduling control technique based on the linear parameter varying system, in conjunction with a new coordinate transformation that considers the arc length of reference trajectory as the independent variable. Through comparative studies, it is observed that the proposed method outperforms the existing ones in trajectory tracking during the whole flight trajectory, which demonstrates its effectiveness and advantages.
Supplementary notes can be added here, including code and math.